Note
Go to the end to download the full example code.
Divergence¶
\[\mathrm{D} = \frac{\partial u}{\partial x} + \frac{\partial v}{\partial y} - \frac{v}{R} \tan \varphi\]
Before proceeding with all the steps, first import some necessary libraries and packages
import easyclimate as ecl
import xarray as xr
import numpy as np
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
import matplotlib.ticker as mticker
Read sample data
udata = ecl.open_tutorial_dataset("uwnd_2022_day5")["uwnd"].sortby("lat")
vdata = ecl.open_tutorial_dataset("vwnd_2022_day5")["vwnd"].sortby("lat")
uvdata = xr.Dataset(data_vars = {"u": udata,"v": vdata})
uvdata
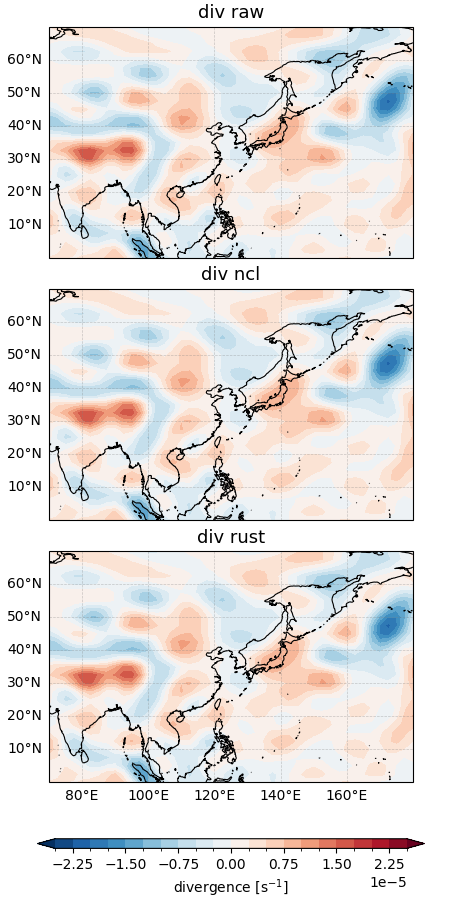
Calculating divergence using three types of functions
easyclimate.calc_divergence: Numpy Method.easyclimate.calc_divergence_ncl: NCL Method.easyclimate.calc_divergence_rs: Rust Method (The calculation process is similar to that of NCL, but it is faster.).
div_raw = ecl.calc_divergence(
uvdata.u,
uvdata.v,
)
div_ncl = ecl.calc_divergence_ncl(
uvdata.u,
uvdata.v,
cyclic_boundary_setting="nan"
)
div_rust = ecl.calc_divergence_rs(
uvdata.u,
uvdata.v,
cyclic_boundary_setting="nan"
)
div_rust
Plot the results of the divergence calculation
import numpy as np
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
import cartopy.feature as cfeature
import matplotlib.ticker as mticker
lonlat_range = [70, 180, 0, 70]
proj = ccrs.PlateCarree()
fig, ax = plt.subplots(
3, 1,
figsize=(4.5, 9),
subplot_kw={"projection": proj},
constrained_layout=True
)
# Unify the color scale range
vmax = 2.5e-5
levels = np.linspace(-vmax, vmax, 21)
cmap = "RdBu_r"
# The three scenes that need to be drawn
fields = [
(div_raw.isel(time=0).sel(level=850), "div raw"),
(div_ncl.isel(time=0).sel(level=850), "div ncl"),
(div_rust.isel(time=0).sel(level=850), "div rust"),
]
pcm = None
for i, (axi, (fld, title)) in enumerate(zip(ax.flat, fields)):
axi.set_extent(lonlat_range, crs=ccrs.PlateCarree())
# Coastlines and Base Maps
axi.coastlines(resolution="50m", linewidth=0.8)
# Grid lines
gl = axi.gridlines(
crs=ccrs.PlateCarree(),
draw_labels=True,
linewidth=0.5,
color="gray",
alpha=0.4,
linestyle="--"
)
gl.top_labels = False
gl.right_labels = False
gl.left_labels = True
gl.bottom_labels = True
# It looks cleaner if you keep the bottom labels on only the bottom row.
if i < 2:
gl.bottom_labels = False
gl.xlocator = mticker.FixedLocator([80, 100, 120, 140, 160, 180])
gl.ylocator = mticker.FixedLocator([0, 10, 20, 30, 40, 50, 60, 70])
# Drawing
pcm = fld.plot.contourf(
ax=axi,
transform=ccrs.PlateCarree(),
levels=levels,
cmap=cmap,
add_colorbar=False,
extend="both"
)
axi.set_title(title, fontsize=13)
# Shared colorbar
cbar = fig.colorbar(
pcm,
ax=ax,
orientation="horizontal",
shrink=0.9,
pad=0.04,
aspect=40
)
cbar.set_label("divergence [s$^{-1}$]")
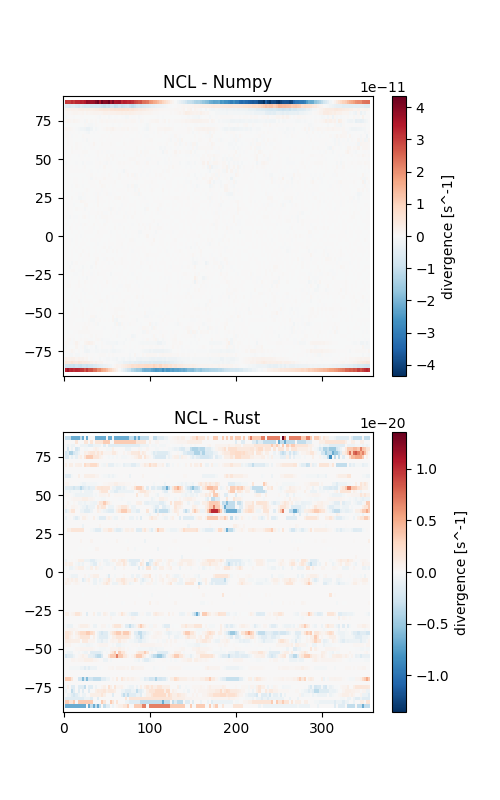
When comparing the results of different calculation methods, it is generally recommended to use the Rust-based method.
fig, ax = plt.subplots(2, 1, figsize = (5, 8), sharex=True)
(div_ncl - div_raw).isel(time = 0).sel(level = 850).plot(ax = ax[0])
ax[0].set_title("NCL - Numpy")
ax[0].set_xlabel("")
ax[0].set_ylabel("")
(div_ncl - div_rust).isel(time = 0).sel(level = 850).plot(ax = ax[1])
ax[1].set_title("NCL - Rust")
ax[1].set_xlabel("")
ax[1].set_ylabel("")
Text(18.09722222222222, 0.5, '')
Total running time of the script: (0 minutes 9.145 seconds)